
广州市第七轴机器人设备有限公司
钻石VIP
搜索标王
联系人:黄小姐
手机:18026416628
东莞便捷桁架机械手,龙门桁架机器人
来源:广州市第七轴机器人设备有限公司
发布时间:2024-11-27 06:39:39

桁架机械手的结构尺寸要比其他类型的机器人的结构尺寸大得多。桁架式机器人的工作空间为一空间长方体。通过控制器对各种输入(各种传感器,按钮等)信号的分析处理,做出一定的逻辑判断后,对各个输出元件(继电器,电机驱动器,指示灯等)下达执行命令,完成X,Y,Z三轴之间的联合运动,以此实现一整套的全自动作业流程。
桁架机械手采用型材或方钢做为主框架,镶嵌直线滑动导轨和齿轮齿条等组成,作为运动框架和载体的精制型材其截面形状通过有限元分析法来优化,生产中的尽心竭力,提高其强度和直线度。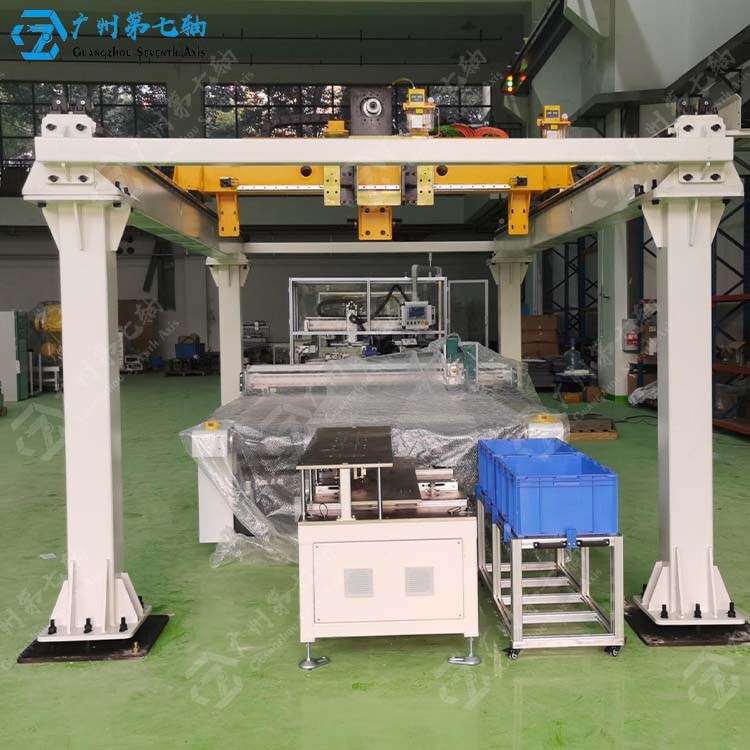
桁架机器人结构件由铝型材或方管,矩形管,槽钢,工字钢等结构组成,其作用是作为导向件、传动件等组件的安装底座,同时也是桁架式机械手负载的主要承担者。
标签:便捷桁架机械手,东莞桁架机械手,非标定制桁架机械手,定制方案桁架机械手
最新产品
更多









热门信息
热门产品
广州市第七轴机器人设备有限公司 > 供应信息 > 东莞便捷桁架机械手,龙门桁架机器人